Comparativo de placas Arduino Nano | Qual Comprar?
Nos últimos anos, a Arduino lançou um conjunto de placas Nano abrangendo diversas características e funcionalidades em um formato compacto. Com isso, a Nano se estabeleceu como uma das opções

Nos últimos anos, a Arduino lançou um conjunto de placas Nano abrangendo diversas características e funcionalidades em um formato compacto. Com isso, a Nano se estabeleceu como uma das opções

O monitoramento do nível de água em uma caixa d’água é uma aplicação importante e prática para garantir o uso eficiente desse recurso vital. Este projeto propõe uma solução prática

A protoboard é uma ferramenta fundamental no universo da eletrônica, sendo amplamente utilizada por engenheiros, estudantes e entusiastas para prototipagem e teste de circuitos eletrônicos. Se você já se aventurou
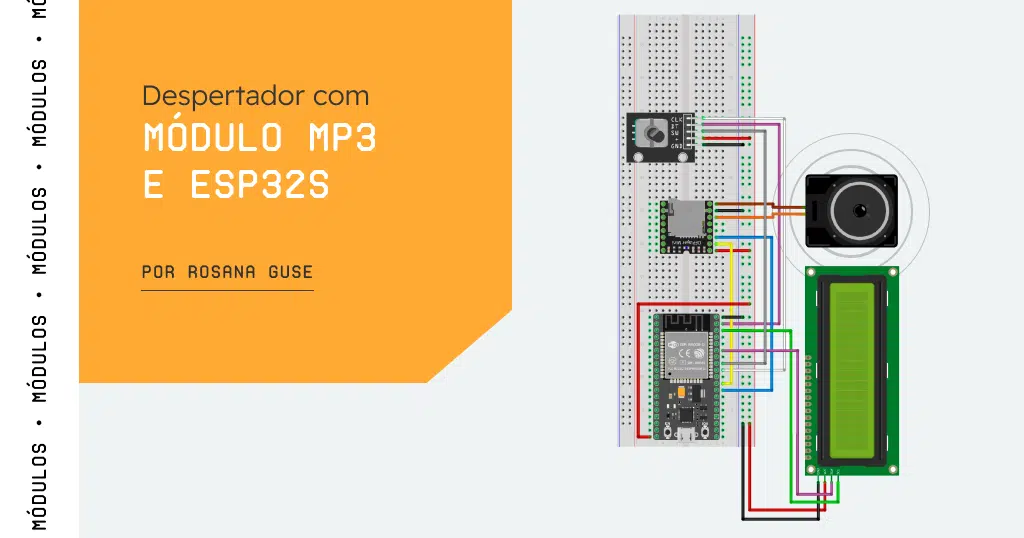
Neste tutorial você aprenderá como criar um despertador personalizável com o ESP32S NodeMCU e o módulo MP3 Arduino DFPlayer Mini. Este projeto combina a praticidade da tecnologia IoT (Internet das

Olá pessoal! Você sabia que é possível ler e gerar ondas quadradas, senoidais, triangulares e dente-de-serra utilizando o Arduino Giga R1? Neste artigo, conheceremos o uso da conversão analógica-digital e

A MakerHero é revendedora oficial da Raspberry Pi no Brasil e em breve teremos a Raspberry Pi 5 no nosso catálogo. Confira suas especificações.
Acesse nosso YouTube
Quer aprender Arduino de forma simples e divertida? Conheça nosso Kit Maker Arduino Iniciante e dê seus primeiros passos no mundo maker!
Acesse nosso YouTube
Você sabia que o Luke Skywalker construía robôs quando era jovem? Agora, imagine que o BB9 é um projeto de um robô inacabado que o Luke esqueceu em seu laboratório e você tem a responsabilidade de dar vida a essa máquina!
Acesse nosso YouTube
O Kit Tetris com Raspberry Pi Pico é ótimo para quem quer botar para jogo as suas habilidades maker e ainda testar seu reflexo e raciocínio rápido. Esse desafio consiste em montar um Jogo Tetris. Para movimentar as peças, é utilizado um Joystick Arduino de três eixos. Além disso, o projeto consta com um módulo com 4 matrizes de led 8×8, onde cada LED na matriz representa um quadradinho que forma os Tetraminós do game.
Acesse nosso YouTube

Neste post vamos ver um projeto que aproveita as qualidades de um display ePaper e da placa Raspberry Pi Pico para apresentar uma lista de tarefas. O Raspberry Pi Pico

O Sense HAT, uma placa de expansão repleta de sensores para o Raspberry Pi, tem se destacado como uma ferramenta versátil e poderosa. Com um display LED de matriz 8×8,

Ao explorar um novo hardware, nada é mais importante para um engenheiro do que determinar imediatamente sua capacidade máxima. Por outro lado, a medição da velocidade de um dispositivo é

Neste artigo vamos alavancar as capacidade de IoT da Raspberry Pi Pico W e construir um Relógio Inteligente que apresenta em um display gráfico colorido a hora atual e a

Há um ano atrás a Raspberry lançou a Raspberry Pi Pico W, uma placa de desenvolvimento que é uma opção de comunicação sem fio de baixo custo, construída com o

Um dashboard (ou “painel de controle”) é uma imagem que apresenta informações necessárias para acompanhar um processo. É muito comum utilizar gráficos para facilitar a visualização das informações. Neste artigo

A placa Raspberry Pi Pico W é uma excelente plataforma de IoT, dispondo de comunicação WiFi para acesso à internet e um amplo conjunto de periféricos para conexão de sensores

O modelo W da Raspberry Pi Pico acrescenta o recurso de comunicação WiFi à poderosa e flexível Pi Pico, facilitando o seu uso em aplicações da Internet das Coisas (IoT).